
فناوری ماشین های خودران
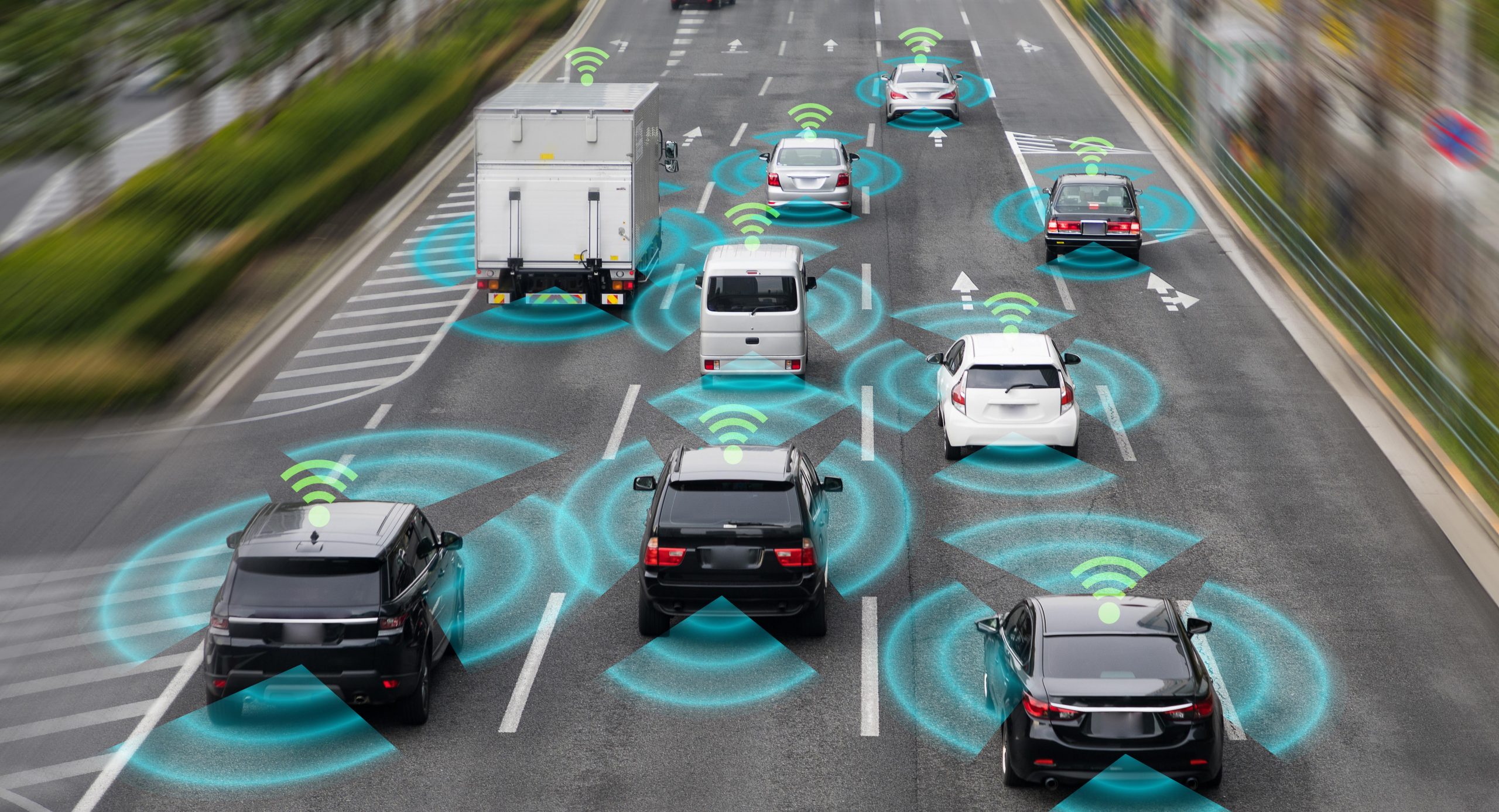
فناوری ماشین های خودران، AV ها از ترکیبی از فناوری ها و حسگرها جهت تشخیص جاده، سایر وسایل نقلیه و اشیاء روی جاده و کنار آن استفاده می نمایند.
فناوری ماشین های خودران
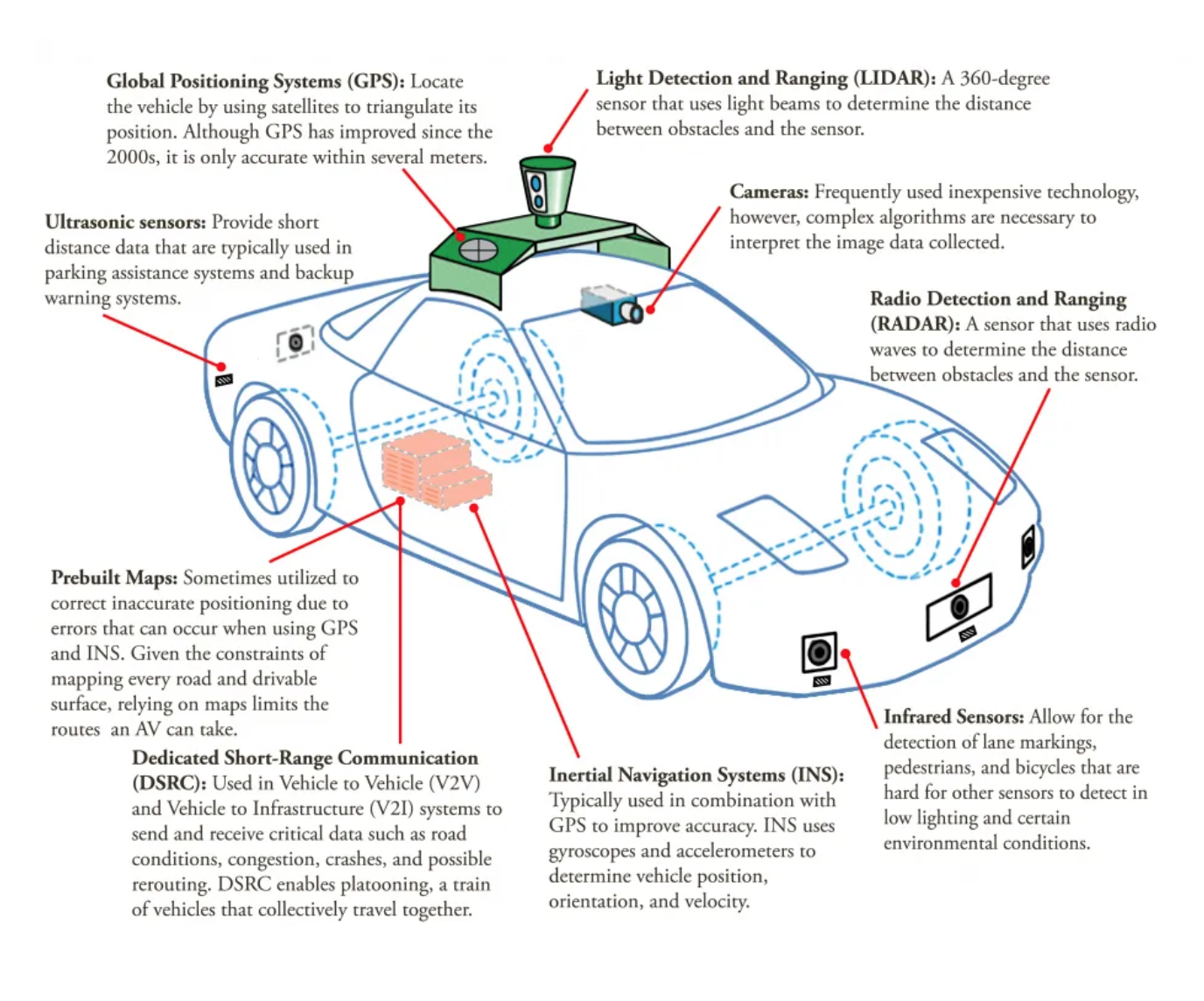
- سیستم های ناوبری اینرسی “Inertial Navigation Systems” ا (INS): به شکل معمول در ترکیب با GPS برای بهبود دقت استفاده می شود. INS از ژیروسکوپ و شتابسنج جهت تعیین موقعیت، جهت و سرعت خودرو استفاده مینماید.
- حسگرهای مادون قرمز “Infrared Sensors”: امکان تشخیص خطها، عابران پیاده و دوچرخههایی را که تشخیص آنها در نور کم و شرایط محیطی خاص برای سنسورهای دیگر دشوار است را میدهد.
- تشخیص رادیویی و برد “Radio Detection and Ranging” ا (RADAR): حسگری که از امواج رادیویی برای تعیین فواصل بین موانع و حسگر استفاده می نماید.
- دوربینها: فناوری ارزانقیمتی که اغلب استفاده میشود، با این حال، الگوریتمهای پیچیده جهت تفسیر دادههای تصویر جمعآوریشده ضروری هستند.
- تشخیص و محدوده نور “Light Detection and Ranging” ا (LIDAR): یک حسگر 360 درجه که از پرتوهای نور برای تعیین فاصله بین موانع و سنسور استفاده می کند.
- سیستم های موقعیت یاب جهانی “Global Positioning Systems” ا (GPS): مکان وسیله نقلیه را با استفاده از ماهواره ها برای مثلث کردن موقعیت آن تعیین کنید. اگرچه GPS از دهه 2000 بهبود یافته است، اما دقت آن تا چند متر است.
- سنسورهای اولتراسونیک “Ultrasonic sensors” : : دادههای مسافت کوتاه را ارائه میدهند که معمولاً در سیستمهای کمک به پارک و سیستمهای هشدار پشتیبان استفاده میشوند.
- نقشه های از پیش ساخته شده “Prebuilt Maps”: گاهی اوقات برای تصحیح موقعیت یابی نادرست به دلیل خطاهایی که ممکن است هنگام استفاده از GPS و INS رخ دهد، استفاده می شود. با توجه به محدودیت های نقشه برداری از هر جاده و سطح قابل رانندگی، تکیه بر نقشه ها مسیرهایی را که یک AV می تواند طی کند محدود می کند.
- ارتباطات کوتاه برد اختصاصی “Dedicated Short-Range Communication” ا (DSRC): در شبکه های Vehicle to Vehicle (V2V) و Vehicle to Infrastructure (V2I)، برای ارسال و دریافت دادههای حیاتی مانند شرایط جاده، تراکم، تصادفها و تغییر مسیر احتمالی استفاده میشود. DSRC دسته بندی platooning را فعال می نماید، قطاری از وسایل نقلیه که به طور جمعی با هم حرکت می کنند.
لیدر های فعلی
- Waymo وسایل نقلیه خود را با رانندگی بیش از 20 میلیون مایل در جاده های عمومی و ده ها میلیارد مایل در شبیه سازی آزمایش نموده است.
- تسلا از سال 2014 بیش از 3 میلیارد مایل را در حالت هدایت خودران رانندگی نموده است
- سایر مشارکتکنندگان اصلی عبارتند از آئودی Audi ، بیامو BMW، دایملر Daimler ، جنرال موتورز GM، نیسان Nissan، ولوو Volvo، بوش Bosch، کانتیننتال Continental،ا Mobileye، Valeo، Velodyne، Nvidia، Ford، و همچنین بسیاری دیگر از شرکتهای فناوری.
محدودیت ها و موانع فعلی
محدودیتها و موانع متعددی وجود دارد که میتواند مانع پذیرش AVها شود، از جمله: نیاز به تقاضای کافی مصرفکننده، تضمین امنیت دادهها، محافظت در برابر حملات سایبری، مقررات سازگار با عملیات بدون راننده، قوانین مسئولیت حل شده، تغییر نگرش و رفتار اجتماعی در مورد بی اعتمادی و متعاقب آن. مقاومت در برابر استفاده از AV و توسعه فناوری های AV تا از نظر اقتصادی مقرون به صرفه شوند.
آب و هوا می تواند بر عملکرد سنسور در AV تأثیر منفی بگذارد و به طور بالقوه مانع پذیرش شود. فورد این مانع را تشخیص داد و در سال 2016 با استفاده از فناوری های مناسب برای شرایط آب و هوایی نامناسب، آزمایش AV را در برف در مرکز آزمایش Mcity دانشگاه میشیگان آغاز نمود.
تأثیرات، راه حل ها و پایداری
اگرچه بعید است که AVها به تنهایی تأثیر مستقیم قابل توجهی بر مصرف انرژی و انتشار گازهای گلخانه ای داشته باشند، اما زمانی که AVها به طور مؤثر با سایر فناوری ها و مدل های حمل و نقل جدید همراه شوند، اثرات غیرمستقیم و هم افزایی قابل توجهی بر اقتصاد، محیط زیست و جامعه را امکان پذیر می سازند. مطالعات نشان داده است که وقتی رانندگی با محیط زیست، دسته بندی، اتصال تقاطعها و سرعتهای سریعتر بزرگراه به عنوان اثرات مستقیم وسایل نقلیه متصل و خودران در نظر گرفته میشوند، مصرف انرژی و انتشار گازهای گلخانهای را میتوان تا 9 درصد کاهش داد.
معیارها و تاثیرات مرتبط
- ازدحام: پیش بینی می شود ازدحام کاهش یابد و مصرف سوخت را 0-4 درصد کاهش دهد. با این حال، کاهش ازدحام احتمالاً منجر به افزایش مایلهای طی شده وسیله نقلیه (VMT) میشود که سود مصرف سوخت را محدود میکند.
Eco-Driving: Eco-Driving، مجموعه ای از شیوه هایی که مصرف سوخت را کاهش می دهد، پیش بینی می شود که مصرف انرژی را تا 20٪ کاهش دهد. با این حال، اگر الگوریتم های AV راندمان را در اولویت قرار ندهند، بازده سوخت ممکن است در واقع کاهش یابد. - دسته بندی: پلاتونینگ، قطاری از وسایل نقلیه جدا شده که مجموعاً از نزدیک با هم حرکت می کنند، انتظار می رود مصرف انرژی را بین 3 تا 25 درصد بسته به تعداد وسایل نقلیه، جدایی آنها و ویژگی های وسیله نقلیه کاهش دهد.
- عملکرد بدون تاکید: عملکرد خودرو، مانند شتاب سریع، احتمالاً زمانی که راحتی و بهره وری در اولویت سفر قرار می گیرند، بی اهمیت می شود و به طور بالقوه منجر به کاهش 5 تا 23 درصدی مصرف سوخت می شود.
- جلوگیری از تصادف بهبود یافته: با توجه به افزایش ویژگی های ایمنی خودروهای AV، تصادفات احتمال کمتری دارد که باعث کاهش وزن و اندازه خودرو می شود و مصرف سوخت را بین 5 تا 23 درصد کاهش می دهد.
- Vehicle Right-Sizing: توانایی تطبیق کاربرد وسیله نقلیه با نیاز معین. اندازه مناسب خودرو این پتانسیل را دارد که مصرف انرژی را بین 21 تا 45 درصد کاهش دهد، اگرچه مزایای کامل آن تنها زمانی محتمل است که با یک مدل سفارشی اشتراکگذاری سواری همراه شود.
- سرعت بالاتر بزرگراه: افزایش سرعت بزرگراه احتمالاً به دلیل بهبود ایمنی، افزایش مصرف سوخت 7-30٪ است.
- کاهش هزینه سفر: پیش بینی می شود که AV ها به دلیل کاهش هزینه بیمه و هزینه زمان به دلیل بهبود بهره وری و راحتی رانندگی، هزینه سفر را کاهش دهند. این مزایا می تواند منجر به افزایش سفر به طور بالقوه افزایش مصرف انرژی 4٪ تا 60٪ شود.
- گروه های کاربری جدید: AV ها احتمالا VMT را به خصوص برای کاربران مسن و ناتوان و مصرف سوخت کاربران جدید را بین 2 تا 10 درصد افزایش می دهند.
- سرویسهای تحرک تغییر یافته: مدلهای کسبوکار مبتنی بر تقاضای اشتراکگذاری سواری به دلیل کاهش قابل توجه هزینههای نیروی کار احتمالاً از AV استفاده میکنند. برآورد میشود که اتخاذ یک مدل اشتراکگذاری سواری مصرف انرژی را بین 0 تا 20 درصد کاهش دهد.
اگرچه در حال حاضر نمی توان ارزیابی دقیقی از این تأثیرات به هم پیوسته انجام داد، اما یک مطالعه تأثیرات بالقوه چهار سناریو را ارزیابی نموده است که هر کدام با احتمالات ناشناخته بودند. خوشبینانه ترین سناریو کاهش 40 درصدی انرژی کل حمل و نقل جاده ای و بدبینانه ترین سناریو افزایش 105 درصدی در کل انرژی حمل و نقل جاده ای را پیش بینی کرده است.
ارتباطات نوری

آموزش شبکه
تجهیزات شبکه














نظرات کاربران